You and the other
How do we know whether something has a mind, a self? Today we published an article on some of the research on this question that my colleagues and I did over the past few years.
AK
3/10/20266 min read
When we speak with another person, we instinctively assume they 'possess a self'—an internal core capable of making decisions, feeling, and solving problems. We grant them agency. When we look at a bicycle, we make no such assumption; it is purely an object.
Yet, between these two extremes lies a vast grey area. A baby may not yet have mastered language to verbally reflect on whether to sweep a glass off a table, but the decision is made nonetheless. What about a dog? A butterfly? Or a Roomba navigating a living room? What specific features or behaviors compel us to grant 'mental capacities' to a being or a machine? While I avoid the term soul, the concept of a mind—and where we choose to draw its boundaries—is at the heart of how we relate to the world.
The Heider and Simmel Experiment
Imagine you are sitting in a darkened room in 1944. A researcher starts a film projector, and you see a simple, two-and-a-half-minute animation of three black shapes—a large triangle, a small triangle, and a circle—moving around a rectangular box with a "door" that opens and closes.
The Viewing Experience: "The Drama in the Box"
At first, you try to remain objective. You see a large triangle move toward a circle. But within seconds, your brain refuses to see them as shapes. Instead, you find yourself scribbling notes that sound more like a movie review than a lab report:
"The big triangle is a bully. He’s aggressive and overbearing. He’s cornered the little circle inside the house (the rectangle) and won't let her out. Now, the smaller triangle—the hero—is coming to her rescue. He’s brave but cautious. Watch how they 'whisper' to each other when the big triangle isn't looking."
What You Feel as a Participant
Social Attribution: You don't see "movements along an x-y axis." You see intentions. When the big triangle bumps into the small one, you don't think "collision"; you think "attack."
Emotional Weight: You feel a genuine sense of relief when the two smaller shapes "escape" the box and move toward the top of the screen together. You perceive their movement as "running away" or "finding safety."
The Climax: When the big triangle is left alone and starts smashing the "walls" of the rectangle, you interpret this as a "temper tantrum." You see frustration and rage in the jerky, rapid movements of a three-sided polygon.
Why This Mattered (The "Aha!" Moment)
After the film, the researchers ask you to describe what you saw. Like 97% of the other participants, you don't say, "I saw a large triangle move 10 centimeters to the left." You tell a story of villains, victims, and heroes.
This experiment proved to Heider and Simmel—and eventually the world—that the human mind is a meaning-making machine. We are so hard-wired for social interaction that we will project human personality, motives, and emotions onto literally anything that moves with a sense of "purpose," even if it’s just a geometric fragment on a screen.

It doesn't take much: Braitenberg's vehicles!
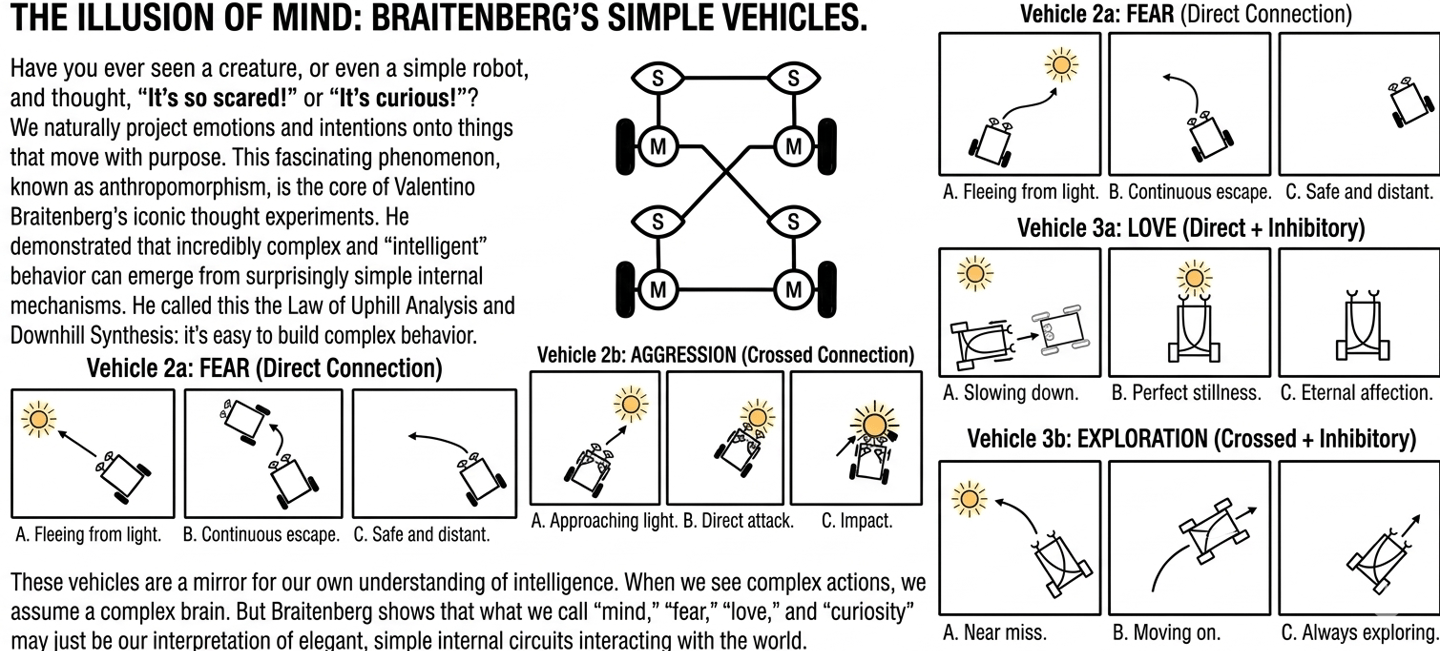
In his 1984 book, Vehicles, Valentino Braitenberg proposed a simple thought experiment: What if we could build machines with basic sensory-motor connections and observe the complex behaviors that emerge? The attached diagram illustrates his core concept: that minimalist design can create sophisticated, seemingly "intelligent" and even "emotional" responses.
Let's break down the illustration from left to right:
The image uses a standardized, clean black-line aesthetic to depict the vehicle’s components and its environment across five key scenarios.
First, the Core Mechanism diagram defines the foundational wiring. You can see two sensors (labeled 'S') and two motors (labeled 'M'). Braitenberg showed that two main connection types define the vehicle’s "personality": Direct Connections (Left Sensor to Left Motor, Right to Right) and Crossed Connections (Left Sensor to Right Motor, and vice versa). These connections are either excitatory (more stimulus makes it go faster) or inhibitory (more stimulus makes it go slower). The bold black lines from your input are maintained here, ensuring consistent texture and line weight throughout the diagram.
Next, the illustration provides a visual breakdown of how these simple connections generate behavioral states, shown as three-frame horizontal narratives.
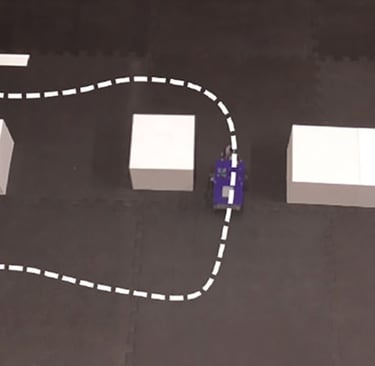
Vehicle 2a: FEAR uses Direct Excitatory connections. We see it approach the light, and as the left sensor gets brighter, the left motor spins faster, forcing it to curve away. The sequential frames ("A. Fleeing," "B. Continuous escape," "C. Safe") demonstrate how a purely mechanical rule generates a complex evasive maneuver that we interpret as "fear."
Vehicle 2b: AGGRESSION swaps the connections to Crossed Excitatory. As it approaches the light, the sensor on one side (e.g., left) drives the motor on the other (right). This forces the vehicle to turn sharply toward the light and accelerate until it hits it. The sequence shown ("A. Approaching," "B. Direct attack," "C. Impact") perfectly captures this single-minded, aggressive pursuit.
Vehicle 3a: LOVE utilizes Direct connections again, but they are inhibitory. The closer the vehicle gets to the light, the brighter the sensors, which sends a slower command to the motors. In the sequence ("A. Slowing," "B. Perfect stillness," "C. Eternal affection"), the vehicle slows down and eventually stops right in front of the light, "gazing" at it permanently. To an observer, this behavior looks like adoration or "love."
Vehicle 3b: EXPLORATION uses Crossed Connections with inhibition. As it moves toward a light, it is attracted, but the closer it gets, the slower its wheels spin, allowing it to miss the light source slightly, "swing past," and speed up again as it moves away to find the next target. The sequence ("A. Near miss," "B. Moving on," "C. Always exploring") visualizes a state of permanent "curiosity" or exploration.
By stripping away the mystery, Braitenberg's vehicles (and this diagram) serve as a conceptual mirror: showing us that what we perceive as complex mental states can often be explained by simple internal rules interacting with the world.
The Naïve theory of the Self
The last four years I worked with colleagues from different universities on a project funded by the Deutsche Forschungsgemeinschaft in the context of a Priority Program on the Active Self. Our project had the title
Reconstructing the naïve theory of the self
Even though the scientific question whether the concept of a “Self” is necessary to explain human behaviour is still open, it is obvious that the concept does play a role in everyday behaviour. Laypeople attribute a self to other humans, but also to non-human animals or technical systems, and they treat them accordingly. For instance, agents that are perceived as having a self are treated more carefully and politely, and they receive more empathy. But what are the criteria for attributing a self to another agent? In this question we do not presume the existence or nonexistence of the self. Uncoupled from the actual self we are interested only in the core characteristics that determine whether we attribute a self to other agents.
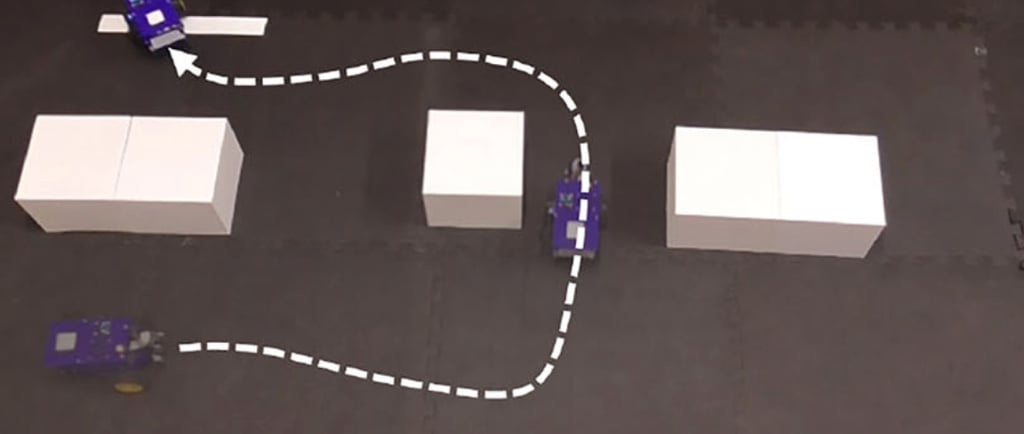
Identifying those characteristics is the scope of the first phase of the project which consist of a series of experiments exploring the effect of nine perceived characteristics on mind attribution. We will investigate the characteristics causality, speed, equifinality, behavioural efficiency, learning and context sensitivity, additionally social sensitivity, attention sharing and helping. We manipulate the behaviour of small robots to either suggest the presence or absence of these characteristics and are then interested in the mind attribution ratings of our participants.
PIs: Bernhard Hommel, Arvid Kappas, Co-PI: Francesco Maurelli, PhD Students: Kristina Nikolovska, Jan Pohl
Over the years, we have presented results linked to our project at conferences and in journal articles. Today, another journal article was published on some of our findings and it is this that motivated this blog post.
Pohl, J., Nikolovska, K., Küster, D., Maurelli, F., Kappas, A., & Hommel, B. (2026). Attribution of selfhood based on simple behavioral cues: Toward a pars-pro-toto account. Cognitive Science, 50(e70188). Find the article here.
Summary
This research investigates how minimal behavioral cues lead people to attribute a sense of selfhood to nonhumanoid robots. Across five experiments, the authors manipulated specific characteristics—causality, equifinality, efficiency, learning sensitivity, and context sensitivity—to see which triggers would cause observers to perceive a robot as having a "self." The findings reveal a Halo-like effect, where even a single cue of intelligent or goal-directed behavior causes people to overgeneralize and assume the robot possesses a wide range of other mental capacities. The authors propose a Pars-Pro-Toto account, suggesting that humans use very small pieces of information to form a complete, though often subjective, concept of an agent's selfhood. This study highlights that self-attribution is less about a robot’s physical appearance and more about how simple movements are interpreted through a human psychological lens. Ultimately, the work suggests that our internal models of "the self" are highly flexible and easily triggered by minimal evidence of agency or environmental awareness.
The results fit into a larger body of research that suggests that as a social species, our brains aim to interpret things and their behavior in terms of social interaction.